文 | 极智 GeeTech
2024 年,是注定被刻进汽车行业发展史的一年。
这一年,从基础援手驾驶到高阶智能驾驶,使得智能化迟缓成为车企针尖麦芒角逐的焦点。
这一年,武汉街头的萝卜快跑驶入公众眼球,特斯拉的无东谈主驾驶出租车 Robotaxi 揭开玄妙面纱,中好意思企业皆在智驾赛谈上一谈决骤。
地平线、黑芝麻智能、文远知行、小马智行等头部智驾企业扎堆 IPO,"端到端"自动驾驶算法落地,城市 NOA、大模子、车路云、自学习、数据闭环等本事纷繁加码,各智驾企业初步落定身位。但巨大的门路不对也成为一谈"分割线",纯视觉与激光雷达、端到端一段式与两段式、单车智能与车路云等本事之争,将智驾行业推向歧路口。
瞻望 2025 年,智驾行业虽异常未明,但"车速"详情。据 IDC 预测,2025 年我国智能汽车出货量将达约 2500 万辆,复合增长率达 16.1%。据中国信通院预计,到 2025 年中国智能驾驶汽车阛阓范围将接近万亿。
跟着本事的不断向上和政策的持续推动,智驾功能将迟缓从高端阛阓向中低端阛阓浸透,成为畴昔汽车阛阓的标配。同期,车路云一体化启动大范围成立,又为智驾行业增添了新的变量。
"分化"成为主旋律
若是给 2025 年的智驾行业界说一个关键词,那么"分化"最贴切不外。
智能驾驶的发展已历经多个阶段,从早期的硬件堆砌,单纯比拼单车感知硬件与智驾芯片算力,到东谈主海战术阶段对开城数目的竞争,如今已迈入 AI 驱动的高阶智驾阶段。据有关测算,2025 年城市高阶智能驾驶阛阓范围有望接近 550 亿元。
2024 年末,大部分主流车企还是罢了了无(高精度)图寰宇皆能开。而第一梯队的玩家,从以章程为主的算法框架,向神经汇注模子为主的新架构切换,也即是时卑鄙行的"端到端"本事,这一本事象征着车辆的智能化水平插足到一个全新阶段。
传统的智能驾驶系统时常遴选模块化架构,感知、预测、野心三方分立为寂寥模块进行处理。固然模块化架构在本事上较为熟谙,但决策中的感知模块通俗依赖于多传感器和谐本事,其弱点在于各模块之间的数据传递和处理存在一定的延伸和信息损耗,可能导致反应速率的问题并影响举座性能。同期,较多的代码和对舆图的需要也使其构建资本存在错误。
端到端大模子的引入改变了这一方位,其将感知、预测、野心三个寂寥的模子同一,大范围数据测验使其大约奏凯从传感器数据中生成适度辅导,幸免了中间才调的延伸和过错积聚,通过"教化"完成学习分析,并最终具备决策才调。
这一特色使端到端系统具备应答多变和复杂场景的才调,线路为车辆不错在莫得事前设定门路的情况下,凭阐明时感知到的环境进行自主判断和野心行驶轨迹。同期也意味着当该系统运行时,处理交通情景是通过近似"直观"来进行判断,从而使车辆运行愈加拟东谈主化,大幅莳植驾驶体验的当然性和恬逸肠。
这轮本事升级,最奏凯的平正是让智驾系统更大程度地享受到了 Scaling Law 数据蔓延带来的红利,让智驾不再按场景分类解题,而是按照"才调"批量解题。
从本事演进来看,2024 下半年端到端模子上车奠定基础。在端到端罢了后,竞争焦点正从单纯比拼城区 NOA 的开城数目转为比拼用户体验,以此为中枢的高阶智驾正处于阛阓高速增长前的关键拐点,成为车企拉开差距、启动分化的一谈分水岭。
但"用户体验"是一个很无极的词,车企需要借助一个强有劲的论据,让用户看到击穿痛点的价值。为此,各大车企在"车位到车位"功能层面张开竞争,并将成为 2025 年智驾畛域的紧要发展节点。谁能罢了更高遮蔽率的全场景驾驶,谁就会不才半程的体验之战中占据优势。
若是说此前"寰宇皆能开"是从面上说明开城范围广,目下的"车位到车位"即是从点上明确使用价值高,把"从 A 点开到 B 点"的底层逻辑映射到实践层面,不错看作车企对于"端到端"设施论的具体演绎。
所谓"车位到车位"智驾,即是上车即可开启智驾,车辆自主从车位开出,自主收支园区和识别闸机抬杆,再经过不管是城市谈路如故高速路,包括城市环岛、掉头等复杂场景,再插足紧闭的园区及小区,自动将导航异常匹配园区及小区内的行驶门路,不管是露天如故地库等各式泊车位,皆大约最终自主泊入车位。
"车位到车位"买通了泊车场到公开谈路、公开谈路到园区、园区大地到地下车库等多种场景,其中"过闸机"才调成为了表述关键词。此前车企在阐述智驾才调时,时常把应答多个顶点场景算作重心论据,但顶点场景千般化无法穷尽。
而在"车位到车位"的语境下,则强调了智驾应回报杂路况的连贯性与完整性。这种出色的泊车才调与车辆行驶之间莫得断点。用户坐进车内,就不错启动智驾,系统不错让自动驾驶与泊车无缝协调,到达下一个车位。
由此,跨过"车位到车位"这谈大坎的玩家们,正在新的竞争形式中开启竞速。目下,华为 ADS 于 2024 年 8 月在享界 S9 委派有关功能;假想汽车在 2024 年 11 月全量推送;小米汽车 12 月推送前卫版;小鹏汽车也积极推动测试与部署;极氪则预计来岁一季度分批推送,二季度全量推送。

这一功能的罢了象征着智能驾驶从点到点的粗浅援手迈向全场景无缝赓续的新阶段,极大莳植了日常驾驶的便利性,减少驾驶员在泊车才调的操作包袱,是智能驾驶普及的关键一步。
这场高阶智驾的比拼至极像体育界的铁东谈主三项,要想赢得竞赛,需要三个中枢成分:本事、工程和居品。高阶智驾要罢了好用、爱用,需要柔和两个维度。一个是 Scale up(性能莳植),即把系统打磨到不错处理各式顶点环境和复杂交通流;另一个是 Scale out(场景泛化),即系统在全场景下在不同的期间、天气、环境和不同的城市皆不错有很好的线路。
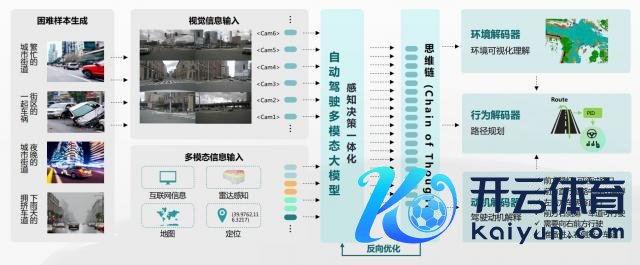
从本事旅途看,不管世界模子也好,如故 VLM(视觉 - 话语模子)也罢,最其后看皆将同归殊途,即是建立 VLA 经过(Vision-Language-Action,即视觉 - 话语 - 动作),举座系统会愈加接近于东谈主的应激反应,(感知)看到什么,(规控)就能作念出相应的驾驶动作。不少智驾行业东谈主士皆将 VLA 视为当下"端到端"决策的 2.0 版块,合计这是畴昔详情的本事门路,仅仅罢了的期间快慢问题。
VLA 架构下,端到端与多模态大模子的赓续将会更透澈。但更具挑战的是,当端到端与 VLM 模子合二为一后,车端模子参数将变得更大,这既要有高效实时推理才调,同期还要有大模子相识复杂世界并给出忽视的才调,对车端芯片硬件有很是高条目。奈何将端到端与多模态大模子的数据与信息进行深度和谐,罢了软硬件的无缝和谐与协同配合,将锻真金不怕火着每一个智驾团队的模子框架界说才调、模子的工程开发才调以及模子快速迭代才调。

事实上,智驾竞争到临了比拼的即是对 AI 资源的消费才调。模子参数越大,对硬件算力、数据闭环的迭代才调条目越高。部署 VLA 模子,对芯片算力品级奏凯来到了 NVIDA DRIVE Thor,算力高达 1000+TOPS,这将进一步拉大智驾各梯队之间的差距。这也意味着,谁掌抓了更多算力和数据资源,谁就将掌抓这场竞争的主动权。
本事门路的蓦地升级与竞赛变奏,为还没发力端到端的玩家确立了更高门槛,先发制东谈主的契机愈加稀有。不错料到的是,跟着 VLA、世界模子等新本事的陆续登场,以及对 AI 资源消费的需求进一步攀升,高阶智驾的里程碑被全面刷新,智驾梯队的席位竞逐将愈加强烈。
关键变量亦然最大增量
在车企竞相发展单车智能的同期,车路云一体化算作 2024 年交通智能化升级的一大新趋势拉开序幕。
此前,不管是终局车企如故智能驾驶畛域的企业,对于高阶自动驾驶发展的柔和点主要集中在汽车本人,举例堆积越来越多高质地的系统建立、经常升级智能驾驶决策的本事、持续收罗更多行车数据作念模子测验等。
2024 年 7 月,工信部、交通运载部等五部门集中发布了对于公布智能网联汽车"车路云一体化"应用试点城市名单的奉告,首度详情了以北京、上海和重庆为首的 20 个城市(集中体)为智能网联汽车"车路云一体化"应用试点城市。
保守预计 2026 年之前,国内车路云一体化的有关的产业范围有望达千亿级以上,畴昔到 2030 年后,预计撬动万亿级阛阓。
不只是我国柔和车路云一体化,好意思国和欧洲多国一样相识到车路云一体化在畴昔智驾畛域中的紧要性。好意思国在发布的智能交通系统战术上钩划全境 75% 的城市和高速公路,在 2035 年应当具备车路云一体化才调,欧洲则在《网联、协和谐自动化出行门路图》中,也强调了车路云一体化的中枢作用。
什么样的智能驾驶才是完满状态?最好状态是车和路皆达到了较高的智能化水平,大约罢了无缝协同,但这仅仅假想状态。实践情况是,不是每一台车皆具备鼓胀高的智能化水平,也并不是每一台车皆不错罢了智能化,范围纷乱的存量非智能车仍是主体。
若是用 L2+ 的车,配上高品级的路(比如 C5 级别),其实也大约达到相比高的智能驾驶水平。是以,目下不可仅依靠单车的智能化,更多是要靠莳植车路云的举座协同才调。
车路云一体化由于增添了路侧和云表设施,加强了车辆与路侧、其他车辆、云表之间的数据信推辞互,使得云表大约依托车辆确刻下情况,以及交通环境的动态变化来作念出最为合理的协同决策,推动车辆从被迫的预警功能向主动适度、提前躲避潜在风险转换。
在畴昔,车路云一体化熟谙度很大程度上取决于"智能新基建"的升级程度。其中,路侧基础设施的成立升级是 2025 年车路云发展和政策的聚焦点,路侧数据在车端的应用水平是预计车路云一体化成立遵循的关键一环。
高质地数据是车路云一体化范围化应用的前提和基础,把有价值的数据索求出来给车企使用是最中枢的才调。莳植数据质地的关键率先在于单节点的数据质地需要鼓胀的高,保证数据质地的中枢并不仅仅硬件征战,而是系统和算法。车路云一体化不是单纯的堆硬件、堆征战,而是需要一整套操作系统把录像头、激光雷达、通讯野心的硬件进行整合和驱动,况兼通过操作系统中的 AI 算法模子对数据进行处理。
其次,要深切了解车企的本色需求,与车企真的买通。畴昔车路云一体化在成立的时候太过于柔和硬件和各样见识,时常皆是从本事东谈主员的角度,用一系列本事尺度来预计车路云的成立遵循,却忽略了车企到底需要什么、提供的数据奈何给车辆使用等更为迫临应用侧的需求。
车路云汇注产生的数据,最终能否给车辆使用、能有几许用户不错奏凯使用,这是车路云成立的中枢尺度。目下在车路云成立过程中,征战层的生态相当丰富还是趋于熟谙,但在系统层、算法层和应用层,还有很大的缺失。这就导致数据在准确性、实时性等方面无法知足智能网联车辆和自动驾驶车辆的真的使用需求。
若是从数据应用角度看,车路云"数据上车"不错分为五个阶段:
第一,路侧基础设施成立阶段,主要将"通感算"的硬件征战部署在路侧;
第二,数据质地达标阶段,针对单节点数据质地进行达标测试,可参考行业泰斗尺度,比如信通院的"双 SL3 ";
第三,数据上车低级应用阶段,通过车路云系统,将信号灯数据、路侧识别到的事件类数据赋能智能网联车辆;
第四,数据上车高档应用阶段,通过车路云系统,将实时孪生数据赋能给智能网联车辆和自动驾驶车辆,真的罢了协同感知、协同决策;
第五,量产车型大范围应用阶段,与车企进行量产车合作,保证车辆大范围接入车路云汇注,并享受各样实时数据就业。
车路云汇注让车辆不再是孑然的智能体,而是融入到一个更大范围的智能交通生态系统中。谈路上布设的智能路侧设施如 AI 数字谈路基站、V2X 通讯征战大约实时监测路况,为车辆提供超视距感知;云表则垄断大数据和 AI 算法,对交通流量进行优化转换,罢了更高效、安全的行车环境。
这套汇注还为车辆提供了强劲的后援撑持,即便在恶劣天气或复杂交通情景下,路侧设施也能提供比车载传感器更褂讪、可靠的数据,并通过云平台的实时候析援手作念出准确判断,这种褂讪性和可靠性对于自动驾驶本事的落地罢了至关紧要。
此外,车路云汇注还将显贵莳植交通系统的智能化和反应遵循。通过集成路侧设施和云表数据,车辆不错获取更庸碌的感知才和谐更精确的数据分析,从而罢了更高效的交通管制。举例,在交通事故发生时,车路云汇注不错马上感知并分析事故情况,实时诊疗交通讯号和车辆旅途,减少事故对交通流量的影响,从而故意于交通管制部门对城市交通的全局可控,莳植交通举座运行遵循。
除了大约莳植车辆在谈路上的智驾才调除外,车路云一体化还将有助于智驾算法的深度开发。通过车路云汇注,不错提供更为纷乱的数据量和丰富的数据类型,对车端数据集酿成强有劲的补充,进一步莳植数据闭环才调,开发更高质地的自动驾驶模子,从而罢了更深端倪的智驾场景挖掘、场景重建和生成。
新一年,中国智驾产业的竞争将不再局限于本事的比拼,更是生态系统与贸易形式的博弈。智驾产业若想取得更大坑害,仍需管制本事瓶颈、章程收尾在内的一系列费事。同期,奈何将车路云一体化这个关键变量改变为产业发展的最大增量,也值得每个参与者的深切念念考。
在智能化下半场开云体育,智驾行业的故事将会更多、更精彩,它能走到哪一步,且让咱们翘首跂踵。